Week 7
Assignment
- Connect a new output device that you haven’t used before.
- Design a program that integrates at least one input and one output device.
- Measure the power consumption of an output device.
Input device
I've had a TTP223 capacitive sensor lying around for a while,
and I finally decided to try it out. I can also use it in my final project, but that's still in decision process.
Output device
For an output device, I chose a stepper motor, since it is necessary in my final project. I need at least five of those motors
in my final project, but they are quite expensive, so I disassembled my old Creality 3D printer and used their Creality 42-40.
I could not find any datasheet for this model, but I expected it to behave the same way as any other Nema 17 stepper.
I am still kinda new to electronics, so I don't get how voltages and current work in steppers. The stepper I used is supposed to have these parameters.
| Specification | Value |
|---|---|
| Step Angle | 1.8° |
| Steps per Revolution | 200 |
| Nominal Voltage | 4.83V |
| Current Rating | 1.5A |
| Rated Speed | 1-1000 RPM |
| Rated Torque | 0.4 Nm |
But I've read somewhere, that the voltage might not matter? I don't get it. I supplied 12 volts, prayed for the best, and it worked.
Stepper consumption
I followed this tutorial for A4988 driver.
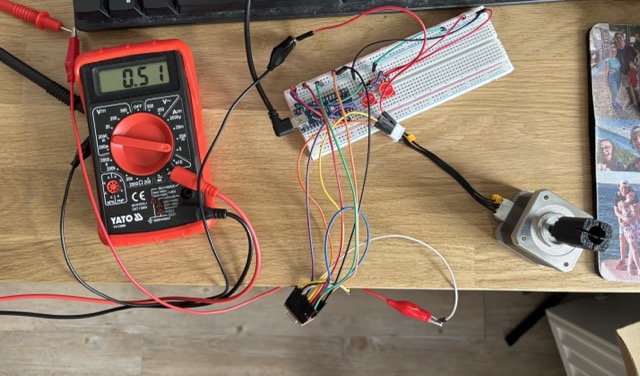
and measured the current using this method:

I measured 0.5 amps. The stepper has rated current 1.5A, but I did not have the recommended capacitor for stepper power supply,
so I thought this setting would prevent the voltage spikes.
Code
#include <AccelStepper.h>
#define SENSOR_LEFT 12
#define SENSOR_RIGHT 11
#define DIR_PIN 2
#define STEP_PIN 3
#define MOTOR_INTERFACE_TYPE 1
const int stepsPerRevolution = 200;
AccelStepper myStepper(MOTOR_INTERFACE_TYPE, STEP_PIN, DIR_PIN);
void setup() {
myStepper.setMaxSpeed(4000);
myStepper.setAcceleration(4000);
pinMode(SENSOR_LEFT, INPUT);
pinMode(SENSOR_RIGHT, INPUT);
}
void loop() {
static bool leftPrev = false;
static bool rightPrev = false;
bool leftTouched = digitalRead(SENSOR_LEFT) == HIGH;
bool rightTouched = digitalRead(SENSOR_RIGHT) == HIGH;
if (!leftPrev && leftTouched) {
myStepper.move(-stepsPerRevolution / 4);
}
if (!rightPrev && rightTouched) {
myStepper.move(stepsPerRevolution / 4);
}
leftPrev = leftTouched;
rightPrev = rightTouched;
while (myStepper.distanceToGo() != 0) {
myStepper.run();
}
}
Schema

Result
Future work
The joint that connects the stepper and the Rubik's cube is too loose. I need to design it with little to no tolerance in order for the cube to have proper 90° rotations.